Technical Specifications
Parameter Items | Specifications |
Dimension | 230×95×48 mm |
Self Weight | < 650 g |
Transmission Mode | Coupled Linkage |
Drive Type | Rolling Screw + Brushless Coreless Motor |
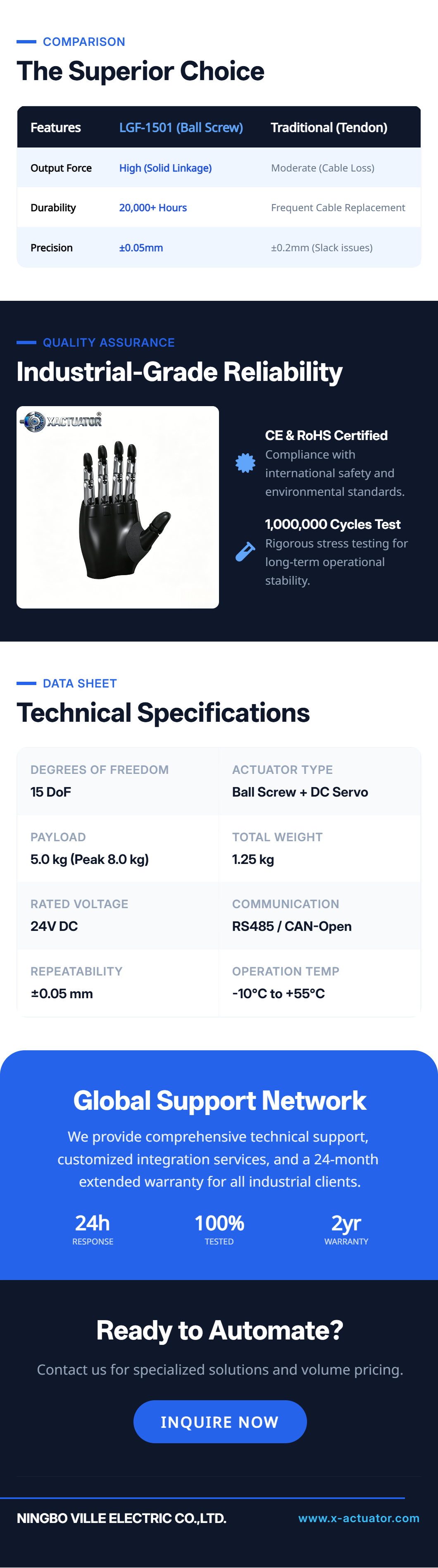
Drive Quantity | 15 |
Finger Active Degrees of Freedom | 15 |
Finger Passive Degrees of Freedom | 5 |
Wrist Degrees of Freedom | 2 |
Single Fingertip Force | 24 N |
Gripping Force | 80 N |
Fingertip Sensor | 6 (Optional) |
Sensor Resolution | 0.01 N |
1. Product Title
Rolling Screw & Brushless Coreless Motor Robotic Hand 15-DOF Dexterous Gripper with Force Sensor
2. Short Description
Lightweight 15-DOF dexterous robotic hand driven by rolling screw and brushless coreless motor. Equipped with high-precision force sensing and coupled linkage transmission, delivering stable 80N gripping force. Ideal for AI intelligent grasping, humanoid robot and industrial automation scenarios.
3. Long Description
This high-precision dexterous robotic hand adopts a rolling screw + brushless coreless motor drive system and advanced coupled linkage transmission structure, featuring high flexibility, precise force control and ultra-light body design. It is a premium end effector specially developed for AI intelligent grasping, humanoid robots, industrial assembly, intelligent sorting and scientific research experiments.
The robotic hand is configured with 15 active finger degrees of freedom, 5 passive finger degrees of freedom and 2 wrist degrees of freedom, realizing multi-angle, all-round flexible manipulation similar to human hands. It supports independent precise control of each finger, with a single fingertip force of 24N and a maximum gripping force of 80N, which can stably grasp rigid, flexible and irregular objects.
Optional 6-point fingertip high-precision sensors are equipped, with a sensor resolution up to 0.01N, achieving ultra-sensitive real-time force feedback to avoid excessive clamping force damage or insufficient grasping stability. Adopting high-efficiency rolling screw transmission, the product features smooth operation, low noise and high transmission accuracy, perfectly matching the high-response operation requirements of AI intelligent control systems.
With compact dimension of 230×95×48mm and ultra-light weight less than 650g, this robotic hand is easy to install and integrate with various robot equipment. It has stable overall performance, strong load capacity and wide adaptability, which can meet long-term continuous operation of industrial automation and high-precision experimental grasping tasks.




长按屏幕识别二维码
打开手机扫描二维码